
Game Discription
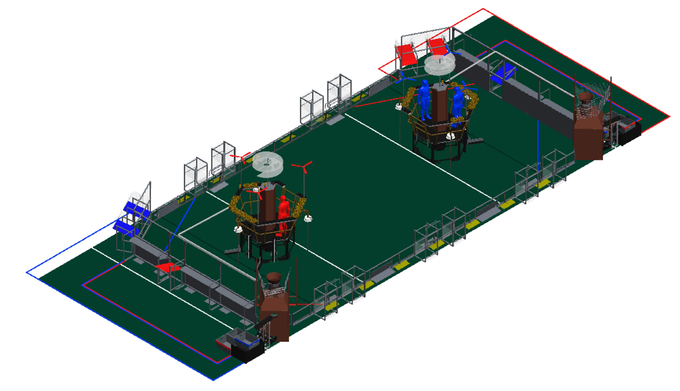
FIRST Steamworks, the 2017 FIRST Robotics Competition game, invites two adventurers’ clubs, in an era where steam power reigns, to prepare their airships for a long distance race.

Official Game Rules
Each three-team alliance prepares in three ways:
1. Build steam pressure. Robots collect fuel (balls) and score it in their boiler via high and low efficiency goals. Boilers turn fuel into steam pressure which is stored in the steam tank on their airship – but it takes more fuel in the low efficiency goal to build steam than the high efficiency goal.
2. Start rotors. Robots deliver gears to pilots on their airship for installation. Once the gear train is complete, they turn the crank to start the rotor.
3. Prepare for flight. Robots must latch on to their airship before launch (the end of the match) by ascending their ropes to signal that they’re ready for takeoff.
Each match begins with a 15-second autonomous period in which robots operate only on preprogrammed instructions. During this period, robots work to support the three efforts listed above and also get points for crossing their baseline.
During the remaining 2 minutes and 15 seconds of the match, the teleoperated period, student drivers control robots. Teams on an alliance work together to build as much pressure and start as many rotors as possible – but they have to be sure they leave enough time to latch on to their airship before the end of the match.
Alliances are seeded in the Qualification tournament using ranking points which are awarded based on a combination of their Win-Loss-Tie record (2 points for a win, 1 point for a tie), the number of times they reach a 40 kiloPascal (kPa) pressure threshold (1 point), and the number of times they start all rotors (1 point).
Our Robot
Basic Abilities
Autonomous
- Cross the line
- 1 gear for all three pegs and cross field
- 1 gear (any side) and 10 balls in boiler and cross field
- 1 gear on boiler side peg and balls from near hopper in boiler
- Able to modify path to work with alliances
Tele-op
- Low goal scoring
- 65 ball hopper capacity
- Active Gear Manipulator (doesn’t rely on human player to lift gear out of robot)
- Pick up from floor and feeder station
- Pneumatic punch
- Feed balls and gears from same side of robot without turning around
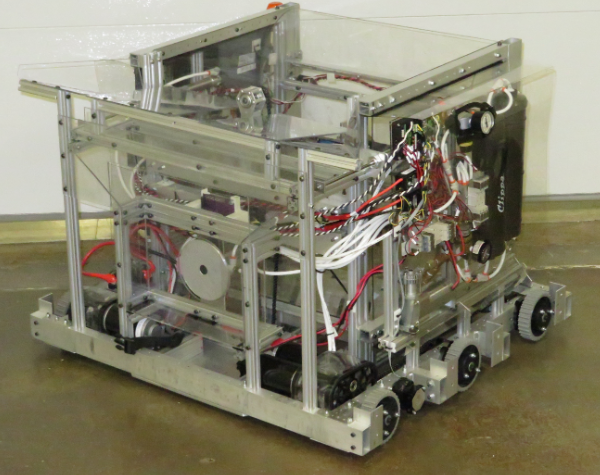
Robot Details
- Height: 2 ft
- Weight: ~117 lbs
- Width: 40 in
- Depth: 36 in
Drive Train
- 2 speed shifting tank drive
- High gear about 22 fps
- Low gear about 6 fps
Climber
- About 2-3 second climb after spool grabs rope (about 5 sec overall)
- Ratcheting lock to prevent falling off rope
Gear Pickup
- Fast gear floor pick-up and scoring on pegs
- One R5-550 intake motor
- Can get gears from feeder station without gear touching the ground
- Gears can’t get stuck in hopper
Fuel Pick-Up
- Direct feed into hopper
- Can both intake and outtake balls
- Reliable ball acquisition
Our Success
2017 Wisconsin Regional
We attended the 2017 Wisconsin Regional from March 22nd to 25th in Milwaukee, WI. We finished in 1st seed and were eliminated in the semifinals. We also won the Innovation in Controls award
2017 Seven Rivers Regional
We attended the 2017 Seven Rivers Regional from April 12th-15th in La Crosse, WI. We finished 3rd seed and won the regional and the Innovation in Controls award.
2017 FIRST Championship
We attended the 2017 FIRST Championship from April 26th-29th in St.Louis, MO. We finished 18th seed and were eliminated in the quarterfinals in the Daly Division.
2017 Rock River Off-Season Compition
We attended the 2017 Rock River Off-Season competition. We finished 3rd seed and won the competition
