
Game Discription
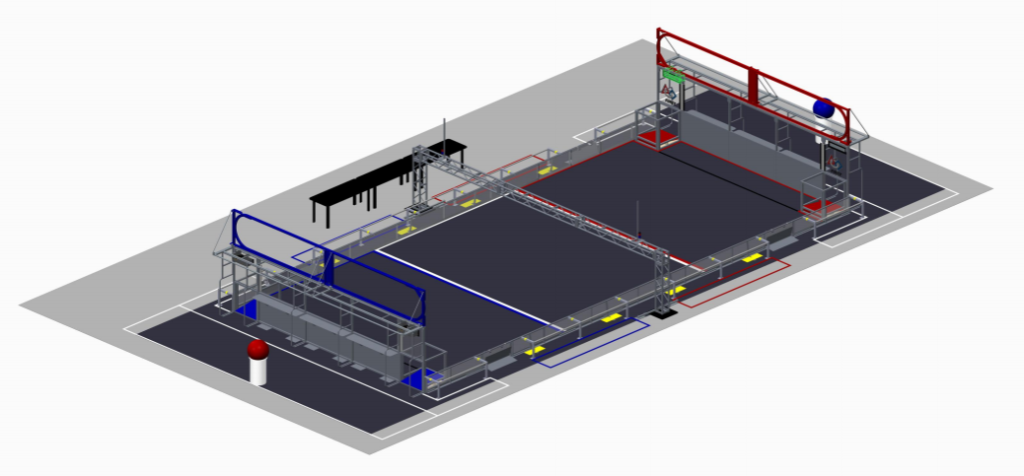
Aerial Assist is played by two competing Alliances of three robots each on a flat 25’ x 54’ foot field, straddled by a truss suspended just over five feet above the floor. The objective is to score as many balls in goals as possible during a two (2)-minute and 30-second match. The more Alliances score their ball in their goals, and the more they work together to do it, the more points their Alliance receives.

Official Game Rules
AERIAL ASSIST is played by two competing Alliances of three Robots each on a flat 25’ x 54’ foot field, straddled by a lighting truss suspended just over five feet above the floor. The objective is to score as many balls in goals as possible during a 2 minute and 30 second match. The more Alliances score their ball in their goals, and the more they work together to do it, the more points their alliance receives.
The match begins with one 10-second Autonomous Period in which robots operate independently of driver. Each robot may begin with a ball and attempt to score it in a goal. Alliances earn bonus points for scoring balls in this mode and for any of their robots that move in to their zones. Additionally, each high/low pair of goals will be designated “hot” for five seconds, but the order of which side is first is randomized. For each ball scored in a “hot” goal, the Alliance earns additional bonus points.
For the rest of the match, drivers remotely control robots from behind a protective wall. Once all balls in autonomous are scored, only one ball is re-entered in to play, and the Alliances must cycle a single ball as many times as possible for the remainder of the match. With the single ball, they try to maximize their points earned by throwing balls over the truss, catching balls launched over the truss, and scoring in the high and low goals on the far side of the field.
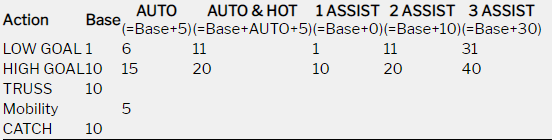
Alliances receive large bonuses for “assists,” which are earned for each robot that has possession of the ball in a zone as the ball moves down the field. Points are awarded for each action per the table below/to the right
Our Robot
General Robot
Our robot, Hermes, is well rounded, both offensively and defensively, with a catcher, shooter, and blocker. The robot’s catcher can expand to give us 40 inches of more space. The drive system allows both high torque and high speed. We designed our shooter as a catapult.

Robot Details
- Weight 103.5 lbs (approximate)
- Height 59.5 in
- Width 27.5 in
- Length 28 inches
- Lightweight custom on-board compressor allows us to store twice the onboard pressure as pre-match compression systems
- Versa frame and aluminum item construction
Drive
- Tank drive
- West coast set up
- 6 4-inch wheels with coefficient of friction of 1.2
- Center wheels dropped 1/16 inch to allow for easier turning
- Two speed gearbox with a gear ratio of 5.60:1 in high gear and 16.36:1 in low gear giving approximate speeds of 15.0 ft/s and 5.5 ft/s
- Utilizes four CIM motors each with 337 watts of power
Pickup
- Roller actuated to twenty inches outside of frame with two, five inch stroke, pneumatic cylinders donated by SMC
- Roller powered by Banebot RS-550 motor with 254 watts for power to a 64:1 gearbox
- Roller forces balls over the bumper and into the shooter
Shooter
- Catapult style shooter tensioned with spear gun tubing
- Driven with an eccentric cam connected to the shooter frame by two linkages donated by Zeman tools
- Powered by a Mini-CIM motor with 229 watts of power to a 300:1 gearbox
Catcher
- PVC frame actuated by two eight inch stroke pneumatic cylinders
- Catchers actuate out 18 inches beyond frame to allow for maximum catching area and actuate inside the frame to avoid accidentally catching an opponent’s ball
Programming
- ‘Culver Drive’ system uses angle of turning stick to provide a more intuitive interface to drivers.
- Hot goal detection ability allows the robot to make 10 point autonomous shots with very high accuracy
- Autonomous provides for both sequential “actions” and long term background tasks.
- Detects which goal is hot
- Drives forward, and shoots
- Driver station interface allows us to provide the drivers with real-time information on the robot subsystems, including the status of the onboard compressor.
Our Success
2014 Wisconsin Regional
From March 20th to the 22nd, we attended the 2014 Wisconsin Regional. We ended 44th seed and did not win any awards, but we were happy to have played.
2014 Midwest Regional
From April 3rd to the 5th, we attended the 2014 Midwest Regional. We ended 20th seed and were eliminated in the semi-finals. We also won the Judge’s Award.
