
Game Discription
Two teams of three robots each compete in a game similar to soccer. They try to get the balls in the goals without incurring penalties and/or tipping over. At the end of the game, a robot can lift itself up onto the bars in the middle. Another robot from the same team can suspend off of the already hanging robot.

Official Game Rules
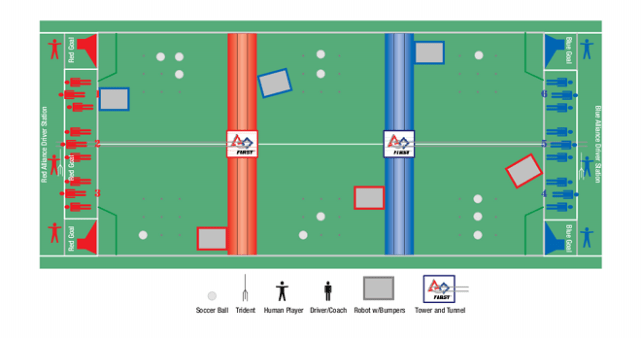
Breakaway is the 2010 FRC Competition, which features goals, bumps, and soccer balls. Robots must kick soccer balls into corner goals for one point each. They must maneuver around or under bumps to reach an end of the field. There are six robots competing at a time, three on either alliance (teams of three). There is 15 seconds of Autonomous (The robot is not controlled by human drivers, but by a program written by students), followed by a two minute Teleoperated period (Where teams are allowed to drive themselves). During the last 20 seconds, human drivers can extend their robots beyond the original maximum dimensions of 28 in x 38 in x 60 in.
Our Robot
General Robot
Our robot this year, dubbed Cratus, is designed to lift and kick. Cratus is designed to be fast and maneuverable. In autonomous mode, we drive forward and kick one, two or three balls depending on our position. During teleoperated period, we kick balls away from opponents with our highly accurate kicker. We are able to score numerous goals and deliver balls to our alliance successfully. Once at the tower, we raise our arm and lift ourselves. There are two bars on each side of our lift for other teams to hang from us. The lift has been tested to support 300 pounds, including the robot. We also have the ability to hang from others, as needed. This strategy gives the alliance at least two points for our hanging, more if others hang from us, and even more if we score goals when kicking. Our robot makes a great addition to any alliance.
Specifications
- Height 60 in, Width 37 in, Length 27 in
- Weight 115 lbs.
- Speed 12 fps.
Actuator
- One CIM motor
- Banebot gearbox
- 27-1 gear ratio
- Two hooks for stability
- Side bars for others to hang from
- Modular design for easy removal
- Two second lift

Kicker
- Kicks 20′ long, and five’ high.
- Bungee cord tensioned
- Window motor powered CAM
- 3-1 gear ratio
- Adjustable angled feet
- Modular design for easy removal
Drive System
- 12.75-1 gear ratio
- 12 ‘ per second speed
- Two tough-boxes per side
- One CIM motor per gear box
- Mecanum wheels
- Great maneuverability
Our Success
2010 Sussex-Hamilton Mini-Regional
This competition day was a learning day above all else. Returning for the 2nd year,we were able to get a better handle on what our robot was and wasn’t able to do. We learned what improvements were needed and we learned from our mistakes. Our driver learned a little more about the restrictions of our robot and how to better operate it. We also realized that one of the actuators was not performing to its highest standard.
2010 Wisconsin Regional
From Thursday the 11th to Saturday the 13thof March, C.O.R.E. competed in the Wisconsin Regional. It was really interesting for the new members on the team, as this was their first FIRST experience. But even for the veteran members, it was still fascinating and fun. After vociferously supporting and cheering for our team on Thursday, Friday, and most of Saturday, our team was put into the top eight teams, making us an alliance captain. We won our first quarter final match, lost the second, and tied the third. In our tie-breaker, it was a nail-biter, but we unfortunately lost. We were able to walk away with the Regional Underwriter’s Laboratory Safety Award (for the third time in a row) and the Entrepreneurship Award (for the second time). We could not wait to head to Minnesota in just a few weeks!
2010 10,000 Lakes Regional
The 2010 10,000 Lakes Regional was held at the Williams Arena in Minneapolis, Minnesota. The competition took place from April 1st to the 3rd. 62 teams were attending along with C.O.R.E. This was our second year attending the 10,000 Lakes Regional. Before the start of this regional, we added a vacuum to get the soccer balls off the wall where we normally could not reach. It worked well and everyone could hear it in the stands. We made an Alliance with MORE 1714 and Ice 3038 and won the regional! On top of that, we won the Entrepreneurship Award and earned the most safety tokens. Our first year we participated in this regional, we made it to the semifinals and won our first match, but then we were eliminated after losing the next two matches. Last year, we were honored to win the Underwriter’s Laboratory Industrial Safety Award and the Motorola Quality Award.
2010 FIRST Championship
After winning the regional at the 10,000 Lakes Regional in Minnesota, we were qualified to go to the 2010 FIRST International Championship. We were very excited that the journey would not be ending in Minnesota. We traveled to Atlanta, Georgia, to compete with the best robots in the world. We made it to the semifinals in our division, Archimedes. We won the largest amount of safety tokens in the Championship. Although we were disappointed not to be able to go on to Einstein Championship Field, we knew the fun was not coming to an end. We plan to do many exciting things this summer and this coming year.
Other Components
- Website team worked on updating the website.
- Safety team made sure the entire robotics team was unharmed.
- Animation team did an amazing job making the safety animation and their annual entry to the Autodesk Visualization Award.
- Awards Won: UL Safety Award, and Entrepreneurship Award (twice).

