
Game Discription
In honor of the 40th anniversary of the 1969 moon landing, the field is made with a special material and teams have to use special wheels. With those two factors, the robots have very little traction to replicate the moon’s low gravity. Each robot, three per team, pulls a trailer behind them. The robots from the other team tries to get a ball into the opposing team’s trailers.

Official Game Rules
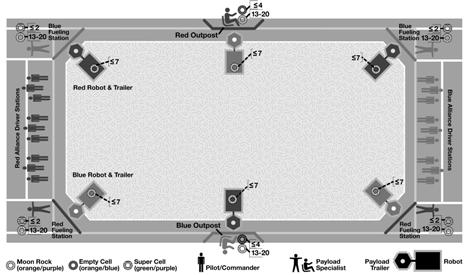
LUNACY is played on a 54′ x 27′ low friction field. Robots are equipped with slippery wheels and payload trailers. LUNACY game pieces are “Orbit Balls” designated as Moon Rocks, Empty Cells, or Super Cells. Two three-team robot alliances collect and score Orbit Balls in trailers attached to the opposing teams’ robots. Human players are positioned around the perimeter of the arena and can score from their stations. Robots are autonomous during the first 15 seconds of play, and teleoperated for the remaining 2 minutes. Trailers begin each match empty, and robots may be loaded with up to 7 Moon Rocks by their team prior to the start of the match. Human players are equipped with 20 Moon Rocks, less than the number they load into their robot, and a quantity of Empty Cells and Super Cells determined by the outcome of their previous match. If a team has not yet played a match, the human player receives 4 Empty Cells and 2 Super Cells. Moon Rocks and Empty Cells scored in an opponent’s trailer, at any time and by any player, are worth 2 points. Super Cells scored in an opponent’s trailer are worth 15 points. Super Cells must be “activated” before they can be played. Activation occurs when a robot delivers an Empty Cell from their Outpost to their Fueling Station. Empty Cells can be delivered throughout the match. Super Cells may only be played during the last 20 seconds of a match.
Our Robot
Specifications
- Height: 50”, Width:27.5”, Length:37.5”
- Weight: 117 lbs.
- Speed: 12 fps
Overview
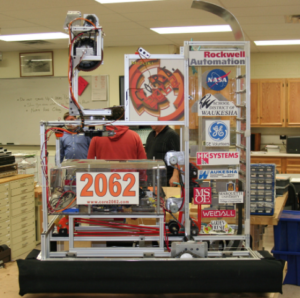
Mizuki was designed to be an competitive robot. Our robot is extremely maneuverable and is capable of rapidly firing balls into the opposing alliance trailers.
Design
The robot design was intentionally kept as simple as possible to allow us to concentrate on perfecting the design. Our conveyor system is a two-staged conveyor system that uses a solid-core round urethane belting. The two stage conveyor system allows us to easily control how many balls we have in our possession and where they are in our system at one time.
Drive System
The drive train utilizes six driven rover wheels. Each side is driven with a CIM motor using a kit of parts gearbox.
Manipulator
Balls are launched by a single rotating traction wheel driven by a CIM motor. The turret is rotated by a window motor. This shooting system is highly accurate. We are able to control the exact distance a ball is launched by simply controlling the speed of the CIM motor. We chose to mount the camera directly on top of the turret and are able to rotate it 30º in either direction.
Our Success
2009 Wisconsin Regional
Our team attended the 2009 Wisconsin Regional held March 12-14th in Milwaukee. We ended 14th seed and were eliminated during the semifinals. We won the Motorola Quality Award and the Underwriters Laboratories Industrial Safety Award.
2009 10,000 Lakes Regional
Our team attended the 2000 Minnesota 10,000 Lakes Regional held April 2nd-4th in Minneapolis. We ended 38th seed and were eliminated during the semifinals. We won the Autodesk Visualization Award, the Motorola Quality Award and the Underwriters Laboratories Industrial Safety Award.
Other Components
- Website team worked on the website.
- Safety team made sure the entire robotics team was unharmed. Thanks to their efforts, we won the UL Industrial Safety Award.
- Animation team did an amazing job making the safety animation and their annual entry to the Autodesk Visualization Award, which we won.
- Awards Won: Motorola Quality Award (twice), UL Industrial Safety Award (twice), and Autodesk Visualization Award.
