
Game Discription
Two teams of three robots each compete against each other by trying to put tubes onto a large center piece called “The Rack”.
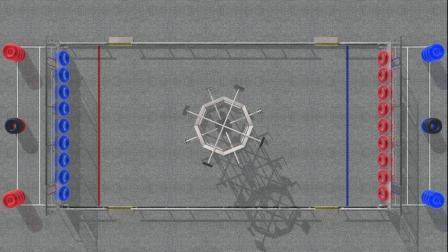
Official Game Rules
Rack ‘n’ Roll is played by two (2) three-team alliances on a 54’x26’ 8” field with a center structure (Rack) containing 24 “spider legs.” To score, teams use three different types of tubes called “Keepers,” “Ringers,” and “Spoilers.” The game is made up of two scoring periods. The first period is “Autonomous” (the robots run without driver control) lasting 15 seconds. In the autonomous period, robots try to place a “Keeper” tube on one of the spider legs of the Rack using a color vision tracking system to find one of the four target lights at the top of the rack. Once placed, a “Keeper” tube may not be removed or “Spoiled.”
During the second period (2 minutes), the robots are driver controlled. In this period the teams will attempt to score more points by using the robots to add “Ringers” onto the spider legs or by “Spoiling” the opposing teams score by placing a black tube over the “Ringer.” Points are earned and scored exponentially by the number of consecutive Ringers and Keepers in a column or row. Alliances may score additional points if, by the end of the match, their robots are in their home zone and have been lifted off the floor by 4” or more by another robot before the final buzzer sounds.
Our Robot
Specifications
- Height: 46″, Width 27.5″, Length 37.5″
- Width, both lifts deployed 119.5″
- Weight: 119.8 lbs.
- Ability to lift more than twice its own weight!
- Software Features
- Independent lift operations
- Non-reversible lift operation
- Other Features
- Omni wheels for tight turning radius
- High traction tires for quick acceleration
- Highly effective pneumatically deployed breaking system to ensure immobility
- Scissor style lifts that have total independent operation
- Mechanical safety latches on the lifts
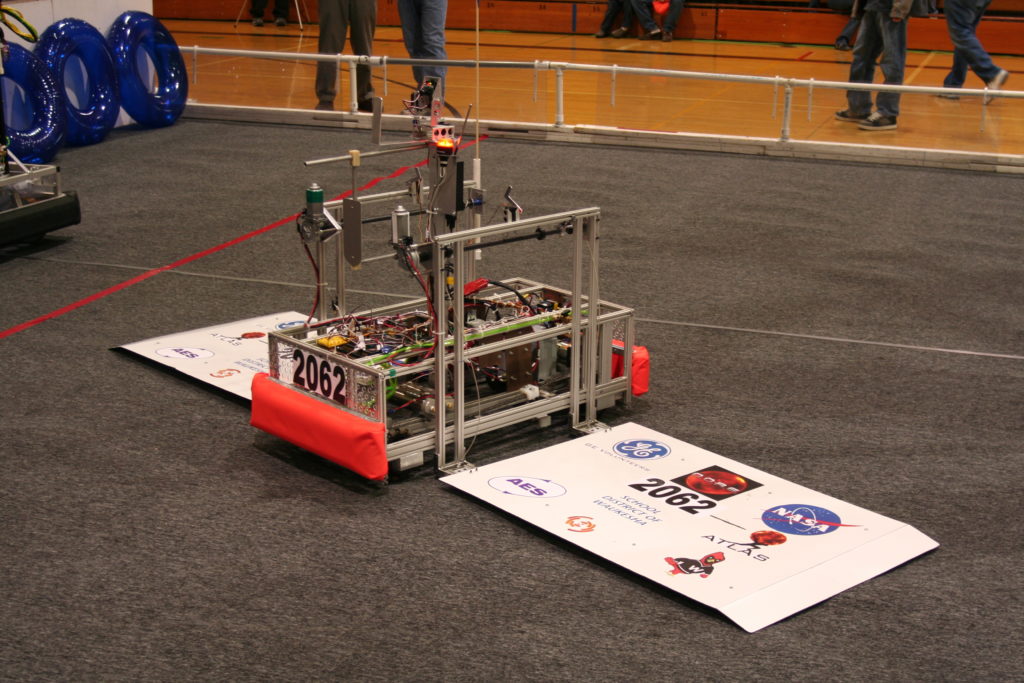
Design
Atlas’s design function was to be a lifting robot. Two independent, integrated, scissors style lifting systems were incorporated into the structure of the robot. These lifts were complimented by a robust drive train that provides both maneuverability and high speed. The drive system allowed Atlas to compliment the alliance partners by negatively impacting the ability of the opposing team to easily maneuver around the spider and reducing their effectiveness of hanging ringers. Maneuverability was obtained by incorporating Omni wheels on the front of the robot and high traction wheels on the back connected together in a tank drive arrangement. An integral pneumatically operated break prevented the front of the robot from being moved by another robot when activated. The lift systems were designed and installed on the robot in a manner whereby Atlas could lift one or two robots to a height exceeding 16”. The lift actions could be totally independent of each other.
Controls
Extra care was taken in the design and manufacture of the controls and power systems in Atlas to provide maximum power, flexibility, and ease of maintainability. The final design allowed maximum power to be delivered to the drive and lift systems. Components were oversized where particle to allow for this maximum delivery of power. The modular component design allowed flexibility to place components near the power distribution or the drive systems which ever was more critical. The modular design permitted easier trouble shooting and component replacement. The entire control system was contained inside the inner structure of the robot for added protection during matches. The end product provided Atlas with the ability to meet its intended function, the most versatile lifting robot of its kind!
Programming
The software code is critical to the functionality of Atlas. The software allowed for easy operator maneuverability, and incorporation of critical lifting safety features. Easy drivability was a key deliverable. The single joystick control was easy to operate by the drivers.
Our Success
2007 Wisconsin Regional
This was our team’s first competition. When our team walked into the US Cellular Arena in Milwaukee, we had no idea what to expect. Our robot performed extremely well, and we were told we had one of the best lifting robots they had ever seen. Unfortunately, our team was eliminated in the quarter finals, but did win the All Star Rookie Award. This award enabled us to continue our incredible journey at the international competition in Atlanta. We were told by many judges and other teams, even though we were a rookie team, they did not consider us one.
2007 FIRST Championship
The highlight of our rookie year was competing at the international competition in Atlanta. We were again complimented at this competition by numerous judges and volunteers on our great lifting system. Our scissor lift system was reliable, robust and greatly exceeded the requirements of the competition. Despite or best efforts, we were eliminated in the quarter finals on the Archimedes field. We learned so much this year about each other and the potential of our team.
Other Components
- Website team worked on the website.
- Animation team did an amazing job making the safety animation and their annual entry to the Autodesk Visualization Award.
- Awards Won: All Star Rookie Award
